Cogging Torque and Torque Ripple
2024-08-22 09:50:34
Cogging torque and torque ripple are two crucial factors that affect the performance and efficiency of motion control systems. In this comprehensive article, we will delve into the concepts of cogging torque and torque ripple, their impact on motion control systems, and strategies to minimize their effects.
Definition and Effects of Cogging Torque
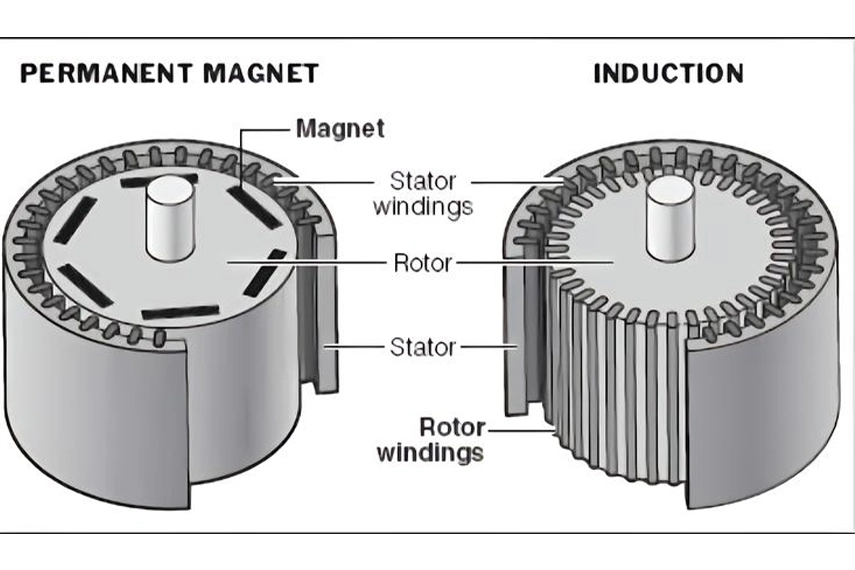
Cogging torque refers to the non-uniform torque produced by a motor due to the interaction between the permanent magnets and the stator teeth. This interaction creates a pulsating torque that can negatively affect the performance of motion control systems. Cogging torque is primarily caused by the magnetic attraction between the rotor's permanent magnets and the stator's teeth. As the rotor rotates, the magnets tend to align with the stator teeth, creating a periodic torque ripple. This phenomenon is independent of the current supplied to the motor and is solely a result of the motor's magnetic structure. Cogging torque is particularly prevalent in brushless motors.
The effects of cogging torque include:
- Jerky Motion: Cogging torque can cause uneven motion, leading to jerky movements in applications that require smooth operation. This can be problematic in industries such as robotics, where precise and fluid motion is essential.
- Reduced Precision: The pulsating nature of cogging torque can introduce inaccuracies in positioning, adversely affecting the precision of motion control systems. This can impact applications that require high levels of accuracy, such as CNC machining or semiconductor manufacturing.
- Increased Energy Consumption: Cogging torque increases the resistance to motor rotation, resulting in higher energy consumption to overcome this resistance. This can impact the overall energy efficiency of the system, leading to increased operating costs and reduced battery life in battery-powered applications.
Definition and Causes of Torque Ripple
Torque ripple refers to the fluctuation in torque output during a single rotation of the motor. It is typically caused by variations in magnetic forces within the motor. Torque ripple can be influenced by factors such as uneven magnetic fields, imperfect rotor construction, and the presence of cogging torque.
The causes of torque ripple include:
- Cogging Torque: Cogging torque plays a significant role in the generation of torque ripple. The interaction between the permanent magnets and the stator teeth can create uneven magnetic fields, leading to variations in torque output during motor rotation.
- Rotor Imperfections: Imperfections in the rotor construction, such as uneven magnet placement or irregularities in the rotor surface, can contribute to torque ripple. These imperfections result in varying magnetic forces, leading to fluctuations in torque output.
- Uneven Magnetic Fields: Non-uniform magnetic fields within the motor can cause variations in torque output during motor rotation. This can occur due to manufacturing tolerances, magnet misalignment, or magnetic saturation.
Differentiating Cogging Torque and Torque Ripple
While cogging torque and torque ripple are related phenomena, they have distinct characteristics:
- Cogging Torque: Cogging torque specifically refers to the non-uniform torque generated by the interaction between the permanent magnets and the stator teeth. It results in a pulsating torque during motor rotation.
- Torque Ripple: Torque ripple encompasses the fluctuation in torque output during a single rotation of the motor. It can be caused by various factors, including cogging torque, uneven magnetic fields, and rotor construction. Torque ripple can manifest as periodic variations in torque output.
Improvement Strategies
To minimize the effects of cogging torque and torque ripple in motion control systems, several strategies can be employed:
- Motor Design Optimization: Motor manufacturers can optimize the design of motors to reduce cogging torque and torque ripple. This can involve modifying the shape and placement of permanent magnets, improving the stator and rotor geometry, and utilizing specialized materials to minimize variations in the magnetic field. Advanced simulation tools and techniques can aid in the design process.
- Advanced Control Techniques: Advanced control algorithms can be implemented to compensate for the effects of cogging torque and torque ripple. These algorithms can dynamically adjust the motor's operating parameters to counteract the fluctuations in torque, leading to smoother operation and improved performance. Techniques such as feedforward compensation, adaptive control, and model-based control can be employed.
- Feedback Systems: High-resolution feedback systems, such as encoders or resolvers, can be integrated into motion control systems. These systems provide real-time position and velocity feedback, enabling better compensation for the effects of cogging torque and torque ripple. Advanced signal processing techniques can be applied to improve the accuracy and reliability of the feedback signals.
- Motor Sizing and Selection: Careful consideration should be given to motor sizing and selection to minimize the effects of cogging torque and torque ripple. Choosing a motor with lower cogging torque characteristics or employing gear reduction systems can help mitigate the adverse effects.
Conclusion
In conclusion, understanding cogging torque and torque ripple is essential for optimizing the performance and efficiency of motion control systems. By employing strategies such as motor design optimization, advanced control techniques, feedback systems, and careful motor selection, the adverse effects of cogging torque and torque ripple can be minimized, leading to improved motion control and energy efficiency.
Other Products





See What Lunyee Can Do For You
Contact Us
- 8619149417743
- +86-0371-5562 0274
- [email protected]
- Zhengzhou, Henan Province, China
- Mon-Fri: 9:00 - 18:00